A maior dificuldade em cartografia é transferir tudo o que existe numa superfície curva que é a Terra para uma superfície plana que é o mapa. Considerando-se que uma figura esférica não se desdobra em um plano, permanece na planificação deformações.
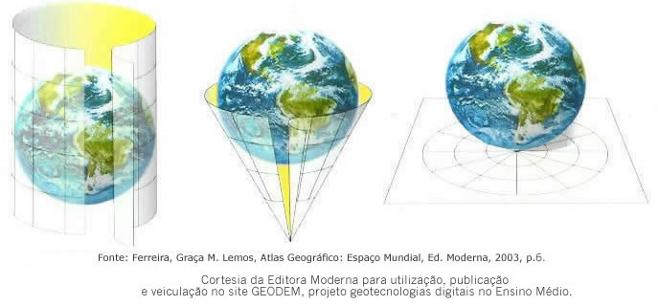
Como a esfera não se desenvolve sobre o plano, passamos a utilizar superfícies intermediárias, ou auxiliares, que tenham a propriedade de se desenvolver. O cilindro, o cone e o plano constituem esses tipos de figuras.
A confecção de um mapa exige, antes de tudo o estabelecimento de um método segundo o qual, a cada ponto da Terra corresponda um ponto no mapa e vice-versa.
Projeção Cartográfica: é um arranjo sistemático de linhas, ou seja, é um “sistema plano de meridianos e paralelos sobre os quais pode ser traçado um mapa” (Erwin Raisz, 1969).Como esse arranjo pode ser estabelecido segundo diferentes condições, cada conjunto de novas condições resultará em uma projeção diferente, existindo então vários sistemas de projeção.
PROPRIEDADES DOS SISTEMAS DE PROJEÇÃO
Não existe nenhuma projeção que elimine todos os tipos de deformações provenientes da transformação da esfera em um plano. As deformações se refletem nos ângulos, comprimentos e nas áreas. Podemos obter representações que conservam em verdadeira grandeza ou ângulos, ou distâncias ou áreas, uma se mantém em detrimento de 2 outras.
Propriedade refere-se ao elemento geométrico que não sofreu deformação.
Sistema Eqüidistante: conserva as distâncias em um ou mais direções.
Sistema Conforme: conserva os ângulos, mantendo a verdadeira forma.
Cartas Náuticas – Projeção Cilíndrica Equatorial Conforme (Projeção de Mercator)
Carta ao Milionésimo/ Mapas Temáticos – Projeção Cônica Equatorial Conforme (Projeção de Lambert)
Obs.: Não existe, na prática, superioridade de um sistema de projeção sobre outro, seja ele plano, cônico ou cilíndrico. A escolha do sistema ficará condicionada, principalmente, a 2 fatores: localização, forma e dimensão da área a mapear;finalidade do mapeamento.
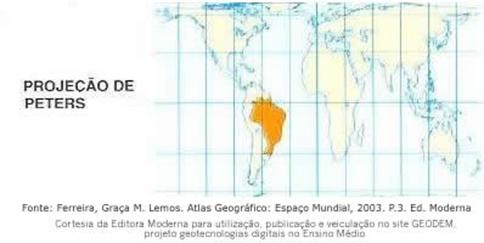
EXEMPLOS MERCATOR E PETERS
Projeção de Mercator, é uma projeçãcilíndrica conforme, que conserva os ângulos verdadeiros por isso é utilizada na navegação e aeronáutica.
A Projeção de Peters é um projeção cilíndrica equivalente, que conserva proporcionalidade das áreas.
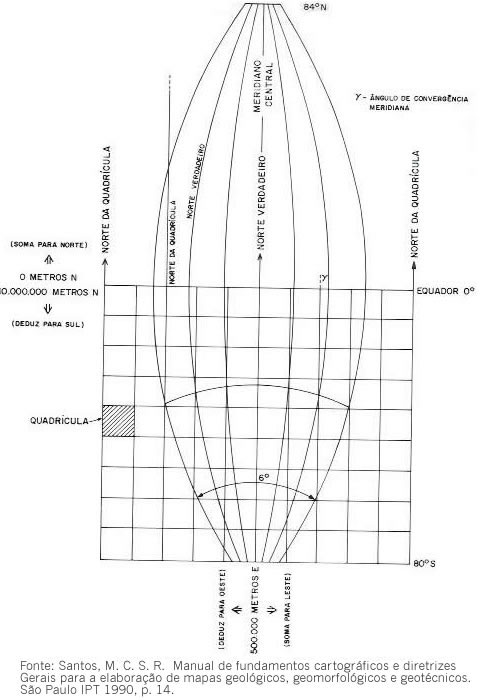
PROJEÇÃO UNIVERSAL TRANSVERSA DE MERCATOR – UTM
O sistema de coordenadas UTM divide a Terra em 60 fusos de 6o de amplitude no sentido da Longitude cada um, que são numerados de 1 a 60, com início no antimeridiano de Greenwich e contado no sentido oeste-leste até chegar a zona 60.
Além das coordenadas geográficas, muitas cartas também são construídas em coordenadas planas, que correspondem matematicamente às coordenadas geográficas da Terra.

 Site para interação
Site para interação